Squid Turtles VS Universal Serial Bus
懐かしい動画を発見しました。
パフォーマンスタイムの動画です。
公式で、輸送ミッションをクリアしている動画は非常に珍しいのではないでしょうか。
確かこの時は、調整なしで臨んでいて、相手チームはパーフェクトでしたが、こちらはひどい結果だったように思います。
今年のミッションももう公開されていますね。
今年も大変そうです。
2016年9月13日火曜日
2016年4月19日火曜日
USB WorldFestival用 ロボット完成。
USBメンターの小林です。
FLL TrashTrek ロボット完成しました。
2分25秒。1121ptです。
動画では、カメとタコを外していますが。。。
ここまで、長かったです。
後は、当日の調整がどこまで上手くいくかというところです。
下記、アタッチメント写真です。
ベースロボットは、2台作成しています。
灰色の方が、「佐藤」
赤色の方が、「鈴木」です。




FLL TrashTrek ロボット完成しました。
2分25秒。1121ptです。
動画では、カメとタコを外していますが。。。
ここまで、長かったです。
後は、当日の調整がどこまで上手くいくかというところです。
下記、アタッチメント写真です。
ベースロボットは、2台作成しています。
灰色の方が、「佐藤」
赤色の方が、「鈴木」です。






2016年4月17日日曜日
USB 最速最強アタッチメント"momoyan"開発記 その8
USBメンターの小林です。
~USBが全国大会で使用したアタッチメントの開発の記録を公開することにしました。
FLL TrashTrek で、開始35秒で8つのミッションをクリアする最強のアタッチメント開発記になります。~
~USBが全国大会で使用したアタッチメントの開発の記録を公開することにしました。
FLL TrashTrek で、開始35秒で8つのミッションをクリアする最強のアタッチメント開発記になります。~
前回のまとめ
ももやんの全容公開!!!
輪ゴム動作箇所 6ヶ所。
基本は壁沿いの全後進の動きで各種ミッションクリアが可能なハイパーアタッチメントです。
という訳で、2分半の全てだとこんな感じです。
さて、最後に。
はじめからこの動画を見ると、様々な事が上手くいき、最初からこういったものがあるように思えますが、開発記を一から読んでいただくと、数々の問題に対し、一つ一つ改善を加えていった様が見えると思います。
さて、よくあるPDCAサイクルですが特に意識したことについて注記しておきます。
計画(Plan):ルート設計の時に考慮されていない動きに関しては、間違いなく実現できません。
実行(Do):とにかく、数を意識して実行します。量が質を生みます。
評価(Check):また、数々の問題を発見するための観察力が必要です。
改善(Act):改善が容易なものから順に試していきます。大きな改善をするときは、別のアタッチメントを実行するなど、時間管理を意識しましょう。

ももやんの全容公開!!!
輪ゴム動作箇所 6ヶ所。
基本は壁沿いの全後進の動きで各種ミッションクリアが可能なハイパーアタッチメントです。
という訳で、2分半の全てだとこんな感じです。
さて、最後に。
はじめからこの動画を見ると、様々な事が上手くいき、最初からこういったものがあるように思えますが、開発記を一から読んでいただくと、数々の問題に対し、一つ一つ改善を加えていった様が見えると思います。
さて、よくあるPDCAサイクルですが特に意識したことについて注記しておきます。
計画(Plan):ルート設計の時に考慮されていない動きに関しては、間違いなく実現できません。
実行(Do):とにかく、数を意識して実行します。量が質を生みます。
評価(Check):また、数々の問題を発見するための観察力が必要です。
改善(Act):改善が容易なものから順に試していきます。大きな改善をするときは、別のアタッチメントを実行するなど、時間管理を意識しましょう。

2016年4月14日木曜日
USB 最速最強アタッチメント"momoyan"開発記 その7
USBメンターの小林です。
さて、更新を随分さぼっておりました。
申し訳ありません。
別件で、4月のスケジュールもアップしようかな、と思いつつ大変すぎたので余り思い出したくない気もします。。
~USBが全国大会で使用したアタッチメントの開発の記録を公開することにしました。
FLL TrashTrek で、開始35秒で8つのミッションをクリアする最強のアタッチメント開発記になります。~
前回のまとめ
とりあえずミッション全クリアの形が出来た。
本番形式の練習を行ったところ、4分かかった。
さて、ついにももやんも最終形態になります。
これまでの、技術を結集し、建物のアタッチメントと合体することになりました。
ご覧の通り、建物を通過することができます。
開始時のセットには時間をかけられるため、複雑なセッティングでもOKです。
建物アタッチメントから、ももやんへの入れ替え作業がなくなるため、大幅な時間短縮をすることができました。
さて、別の角度からの動画です。
先程は、建物を壊す仕組みがまだ仕上がっておりませんでした。
今回は、しっかりと建物を壊すことができます。
さて、こんな感じでようやくももやんの最終形態ができてきました。
次回は、いよいよ全国で使用したアタッチメントの全容を公開したいと思います。
最後に今年の缶バッジデザインを。。。
少しやっつけすぎでしょうか。

さて、更新を随分さぼっておりました。
申し訳ありません。
別件で、4月のスケジュールもアップしようかな、と思いつつ大変すぎたので余り思い出したくない気もします。。
~USBが全国大会で使用したアタッチメントの開発の記録を公開することにしました。
FLL TrashTrek で、開始35秒で8つのミッションをクリアする最強のアタッチメント開発記になります。~
前回のまとめ
とりあえずミッション全クリアの形が出来た。
本番形式の練習を行ったところ、4分かかった。
さて、ついにももやんも最終形態になります。
これまでの、技術を結集し、建物のアタッチメントと合体することになりました。
ご覧の通り、建物を通過することができます。
開始時のセットには時間をかけられるため、複雑なセッティングでもOKです。
建物アタッチメントから、ももやんへの入れ替え作業がなくなるため、大幅な時間短縮をすることができました。
さて、別の角度からの動画です。
先程は、建物を壊す仕組みがまだ仕上がっておりませんでした。
今回は、しっかりと建物を壊すことができます。
さて、こんな感じでようやくももやんの最終形態ができてきました。
次回は、いよいよ全国で使用したアタッチメントの全容を公開したいと思います。
最後に今年の缶バッジデザインを。。。
少しやっつけすぎでしょうか。

2016年4月1日金曜日
USB クラウドファンディング本日よりスタート!!
USB メンター小林です。
アタッチメントの開発記が多忙すぎて更新できておりません。近日中に投稿予定です。
今しばらくお待ちください。
さて、本日はUSBのスポンサー集めの一環であるところのクラウドファンディングについてです。
ついに、4/1からページが公開されました!!
支援者には、UniversalSerialBusオリジナルUSBや、缶バッジ、世界大会のレポートが送られます!!
是非一度ご覧ください!!!
ReadyFor
https://readyfor.jp/projects/FLL-USB

アタッチメントの開発記が多忙すぎて更新できておりません。近日中に投稿予定です。
今しばらくお待ちください。
さて、本日はUSBのスポンサー集めの一環であるところのクラウドファンディングについてです。
ついに、4/1からページが公開されました!!
支援者には、UniversalSerialBusオリジナルUSBや、缶バッジ、世界大会のレポートが送られます!!
是非一度ご覧ください!!!
ReadyFor
https://readyfor.jp/projects/FLL-USB

2016年3月24日木曜日
USB 最速最強アタッチメント"momoyan"開発記 その6
USBメンターの小林です。
USBが全国大会で使用したアタッチメントの開発の記録を公開することにしました。
FLL TrashTrek で、開始35秒で8つのミッションをクリアする最強のアタッチメント開発記になります。
前回のまとめ
とりあえずミッション全クリアの形が出来た。
という訳で、通しの動画になります。
という訳で、およそ最初に考えた戦略通りアタッチメントが出来ました。
ルート3の動きだけ違いますが、これはトラックレール沿いに移動した方が精確で且つ時間が短かったためです。

もちろんアタッチメントの付け替えの練習はしていないので、通しでなんと4分、、、
2分半におさめるために何をしていくのかが重要な課題として浮上してきます。。。
ももやんとは関係ないですが、各アタッチメントについてさらっと解説をしていきたいと思います。
ルート1
ミッション:建物、トイレ
想定では、入れ替えを含め10秒以内で100%ミッションをクリアするもの。
一応、この時点で及第点かな、という出来。
動きはスーパーシンプルに、前進⇒輪ゴムを開放⇒建物、トイレ回収⇒後進 というもの。
ルート2 ~ももやん~
ミッション:ビニール袋、生ごみ処理機、メタン、ニワトリ、廃車
前回までの動画だとわからなかったかと思うのですが、この通り非常にセッティングが面倒。
精確性は一定以上のものだったので、十分採用圏でしたが、入れ替え時間の問題が非常に大きいことがわかった。
ルート3
ミッション:トラック、メタン、おもちゃ
こちらは、関東大会から大きく変化はなし。
トラックを持ち上げる腕は、ゴッドハンドと呼ばれていたような気がします。
ギアを大幅に落として、誤作動を減らしたくらいでしょうか。
また、このアタッチメントは時短のため、ルート4と兼用になっています。
前後を入れ替えるだけで、ルート4は発射可能
ルート4
ミッション:おもちゃ、メタン、ビニール袋、再利用
関東大会では無残にも失敗したあたりの新開発アタッチメント。
随所に粗さが見られます。
1モータでビニール袋をとり、おもちゃ工場にはぶつかるだけで、おもちゃ、メタンが出来る仕組み
ルート5
ミッション:分別(黒、黄、青) 専門職(人形) タコ
位置の調整が非常に大変でした。
スタートから、ほぼ回転センサのみで合わせています。
人形は、滑り台で緑の容器(黒)にいれます。
タコは終了時に上手く処分できるようにしました。タコは乗っているだけです。
判定が審判泣かせだと言われました。
今回は文字だらけですね。
次回は写真を多めにしたいと思います。
それでは。。。
USBが全国大会で使用したアタッチメントの開発の記録を公開することにしました。
FLL TrashTrek で、開始35秒で8つのミッションをクリアする最強のアタッチメント開発記になります。
前回のまとめ
とりあえずミッション全クリアの形が出来た。
という訳で、通しの動画になります。
という訳で、およそ最初に考えた戦略通りアタッチメントが出来ました。
ルート3の動きだけ違いますが、これはトラックレール沿いに移動した方が精確で且つ時間が短かったためです。

もちろんアタッチメントの付け替えの練習はしていないので、通しでなんと4分、、、
2分半におさめるために何をしていくのかが重要な課題として浮上してきます。。。
ももやんとは関係ないですが、各アタッチメントについてさらっと解説をしていきたいと思います。
ルート1
ミッション:建物、トイレ
想定では、入れ替えを含め10秒以内で100%ミッションをクリアするもの。
一応、この時点で及第点かな、という出来。
動きはスーパーシンプルに、前進⇒輪ゴムを開放⇒建物、トイレ回収⇒後進 というもの。
ルート2 ~ももやん~
ミッション:ビニール袋、生ごみ処理機、メタン、ニワトリ、廃車
前回までの動画だとわからなかったかと思うのですが、この通り非常にセッティングが面倒。
精確性は一定以上のものだったので、十分採用圏でしたが、入れ替え時間の問題が非常に大きいことがわかった。
ルート3
ミッション:トラック、メタン、おもちゃ
こちらは、関東大会から大きく変化はなし。
トラックを持ち上げる腕は、ゴッドハンドと呼ばれていたような気がします。
ギアを大幅に落として、誤作動を減らしたくらいでしょうか。
また、このアタッチメントは時短のため、ルート4と兼用になっています。
前後を入れ替えるだけで、ルート4は発射可能
ルート4
ミッション:おもちゃ、メタン、ビニール袋、再利用
関東大会では無残にも失敗したあたりの新開発アタッチメント。
随所に粗さが見られます。
1モータでビニール袋をとり、おもちゃ工場にはぶつかるだけで、おもちゃ、メタンが出来る仕組み
ルート5
ミッション:分別(黒、黄、青) 専門職(人形) タコ
位置の調整が非常に大変でした。
スタートから、ほぼ回転センサのみで合わせています。
人形は、滑り台で緑の容器(黒)にいれます。
タコは終了時に上手く処分できるようにしました。タコは乗っているだけです。
判定が審判泣かせだと言われました。
今回は文字だらけですね。
次回は写真を多めにしたいと思います。
それでは。。。
2016年3月23日水曜日
USB 最速最強アタッチメント"momoyan"開発記 その5
USBメンターの小林です。
USBが全国大会で使用したアタッチメントの開発の記録を公開することにしました。
FLL TrashTrek で、開始35秒で8つのミッションをクリアする最強のアタッチメント開発記になります。
前回のまとめ
ももやん2号機での実験が開始した。
という訳でももやん2号機の途中経過です。
ちゃんと右腕を振り下ろし、合体し、帰ることが出来るようになりました。
が、成功率がとても低い、、、、
メタンを落としてしまったり、途中で機体がそれてしまい、セイフティエリアへ戻れない等、、、
なかなか思うようにいかず、ここまでで年末の活動は終了となってしまいました。
そんなこんなで、新年明けて活動開始です。
年末の反省から、ベースロボットとももやんの合体する機構について改良を加えています。
これは、OBのH賀くんが原案です。
しかし、開発にはなかなかの時間がかかりました。。。
ももやんの右側。生ごみ処理機にぶつかる部分の上部に新たにパーツ群がついています。
これが、今回の肝となるシステムです。
ベースロボットには角がついており、ももやん側には穴が開いています。
スタート時には、ベースロボットとももやんの間に隙間を作り、帰還時にはその隙間がなくなることで穴に角が入り引っかかる仕組みになっています。
え?わからない?
3号機でも同じシステムを採用しておりますので、詳しい解説はまた行いたいと思います。
それはそうと、ニワトリも廃車も安定してこなせるようになってきました。
ここで持ち上がってきた課題としては、、、、
セッティングに非常に時間がかかる。という事です。
次回、通しの動画をあげていきます。
この時点でほぼ全てのミッションをクリアするようにアタッチメントができています。
どんなものか、お楽しみに!
USBが全国大会で使用したアタッチメントの開発の記録を公開することにしました。
FLL TrashTrek で、開始35秒で8つのミッションをクリアする最強のアタッチメント開発記になります。
前回のまとめ
ももやん2号機での実験が開始した。
という訳でももやん2号機の途中経過です。
ちゃんと右腕を振り下ろし、合体し、帰ることが出来るようになりました。
が、成功率がとても低い、、、、
メタンを落としてしまったり、途中で機体がそれてしまい、セイフティエリアへ戻れない等、、、
なかなか思うようにいかず、ここまでで年末の活動は終了となってしまいました。
そんなこんなで、新年明けて活動開始です。
年末の反省から、ベースロボットとももやんの合体する機構について改良を加えています。
これは、OBのH賀くんが原案です。
しかし、開発にはなかなかの時間がかかりました。。。
ももやんの右側。生ごみ処理機にぶつかる部分の上部に新たにパーツ群がついています。
これが、今回の肝となるシステムです。
ベースロボットには角がついており、ももやん側には穴が開いています。
スタート時には、ベースロボットとももやんの間に隙間を作り、帰還時にはその隙間がなくなることで穴に角が入り引っかかる仕組みになっています。
え?わからない?
3号機でも同じシステムを採用しておりますので、詳しい解説はまた行いたいと思います。
それはそうと、ニワトリも廃車も安定してこなせるようになってきました。
ここで持ち上がってきた課題としては、、、、
セッティングに非常に時間がかかる。という事です。
次回、通しの動画をあげていきます。
この時点でほぼ全てのミッションをクリアするようにアタッチメントができています。
どんなものか、お楽しみに!
2016年3月22日火曜日
USB 最速最強アタッチメント"momoyan"開発記 その4
USBメンターの小林です。
USBが全国大会で使用したアタッチメントの開発の記録を公開することにしました。
FLL TrashTrek で、開始35秒で8つのミッションをクリアする最強のアタッチメント開発記になります。
前回のまとめ
ももやん1号機の試作が終了し、2号機が完成した!
ももやん2号機
ベースロボットの部分とプログラムはほとんど変わっていません。
大きく変わった部分として、シンプルにコンパクトに頑丈になりました。
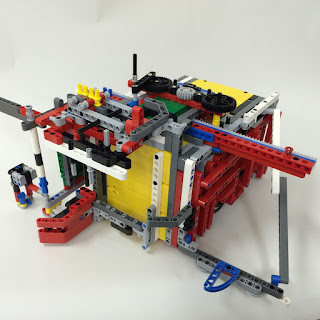
コンパクトになったことで、ベース限界の大きさに若干の余裕ができたため、廃車ミッション用のパーツをベースロボットの左側につけることができるようになりました。
前回のロボットの仕組みはやはり色々と無理があるということが判明しましたね。
ももやん1号機時代のベースロボット。廃車ミッションのためだけにこれだけ上部に巨大なものが載っていた。

さて、そして2号機になり、機体がシャープになったところで大きな変更点がでました。
このように、ももやんの後ろについていたカベパーツがなくなりました。
カベパーツは、セイフティエリアへの帰還時に必要になるものなのですが、前進時にはただ邪魔なだけ。しかも、ももやんとベースロボットが分離する際、合流する際に車庫入れをしなければならないといった非常に面倒な仕組みでした。
カベパーツを外したことで、ベースロボットはスムーズにももやんから分離し、次の動作に入って行くことができます。
そして帰還時は、腕を振り下ろし合体する。。。予定です。
些細な変更点として、ビニール袋の回収が安定し、タコ、カメについては精確性の観点から一時保留となっています。
また、ベースロボットの分離後の動きも少しずつ精確性が増してきました。
さて、次回はいよいよももやん2号機完成です。
なるべく早く投稿できるように頑張ります!
USBが全国大会で使用したアタッチメントの開発の記録を公開することにしました。
FLL TrashTrek で、開始35秒で8つのミッションをクリアする最強のアタッチメント開発記になります。
前回のまとめ
ももやん1号機の試作が終了し、2号機が完成した!
ももやん2号機
ベースロボットの部分とプログラムはほとんど変わっていません。
大きく変わった部分として、シンプルにコンパクトに頑丈になりました。
コンパクトになったことで、ベース限界の大きさに若干の余裕ができたため、廃車ミッション用のパーツをベースロボットの左側につけることができるようになりました。
前回のロボットの仕組みはやはり色々と無理があるということが判明しましたね。
ももやん1号機時代のベースロボット。廃車ミッションのためだけにこれだけ上部に巨大なものが載っていた。

さて、そして2号機になり、機体がシャープになったところで大きな変更点がでました。
このように、ももやんの後ろについていたカベパーツがなくなりました。
カベパーツは、セイフティエリアへの帰還時に必要になるものなのですが、前進時にはただ邪魔なだけ。しかも、ももやんとベースロボットが分離する際、合流する際に車庫入れをしなければならないといった非常に面倒な仕組みでした。
カベパーツを外したことで、ベースロボットはスムーズにももやんから分離し、次の動作に入って行くことができます。
そして帰還時は、腕を振り下ろし合体する。。。予定です。
些細な変更点として、ビニール袋の回収が安定し、タコ、カメについては精確性の観点から一時保留となっています。
また、ベースロボットの分離後の動きも少しずつ精確性が増してきました。
さて、次回はいよいよももやん2号機完成です。
なるべく早く投稿できるように頑張ります!


2016年3月18日金曜日
USB 最速最強アタッチメント"momoyan"開発記 その3
USBメンターの小林です。
USBが全国大会で使用したアタッチメントの開発の記録を公開することにしました。
FLL TrashTrek で、開始35秒で8つのミッションをクリアする最強のアタッチメント開発記になります。
前回のまとめ
ももやん1号機がなんとなく完成した!
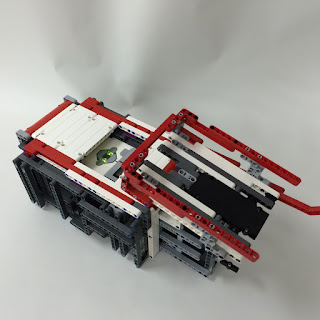
さて、今回はももやんの改良についてコメントしていきましょう。
前回のアタッチメントに加えて、何やら怪しげなものがついています。
これが、廃車をクリアするようの仕組みになっています。
もともと、廃車ミッションそのものは押すだけの動きでクリアが可能です。
そのためロボットの横にパーツがついていればそれでいいのですが、ももやんが巨大なためベースに収まりきりません。
そのため苦肉の策として、上に載せてしまおうというものです。

という訳で、ベースの上からの写真。
もう、ぎりっぎりです。
さて、次の動画が、おおよそ完成のようなものになります。
全く成功していませんが、ミッションとしては
タコ、カメ、メタン、ビニール袋、生ごみ処理機、廃車、ニワトリに取り組んでいます。
確か、全てをクリアすることは出来なかったと記憶しています。
ここまでで、ももやん1号機のお仕事は終了です。
巨大アタッチメントを作る際の注意点、各ミッションをクリアする際の鍵となるポイントをしっかりテストすることができました。
実は、この1号機はもともとテスト機体として作られたものです。
そのため、実際に動かしてテストをしている傍らでは、2号機の建設が同時進行をしていました。
次回は2号機のお披露目になります。
それでは。。。
USBが全国大会で使用したアタッチメントの開発の記録を公開することにしました。
FLL TrashTrek で、開始35秒で8つのミッションをクリアする最強のアタッチメント開発記になります。
前回のまとめ
ももやん1号機がなんとなく完成した!
さて、今回はももやんの改良についてコメントしていきましょう。
前回のアタッチメントに加えて、何やら怪しげなものがついています。
これが、廃車をクリアするようの仕組みになっています。
もともと、廃車ミッションそのものは押すだけの動きでクリアが可能です。
そのためロボットの横にパーツがついていればそれでいいのですが、ももやんが巨大なためベースに収まりきりません。
そのため苦肉の策として、上に載せてしまおうというものです。

という訳で、ベースの上からの写真。
もう、ぎりっぎりです。
さて、次の動画が、おおよそ完成のようなものになります。
全く成功していませんが、ミッションとしては
タコ、カメ、メタン、ビニール袋、生ごみ処理機、廃車、ニワトリに取り組んでいます。
確か、全てをクリアすることは出来なかったと記憶しています。
ここまでで、ももやん1号機のお仕事は終了です。
巨大アタッチメントを作る際の注意点、各ミッションをクリアする際の鍵となるポイントをしっかりテストすることができました。
実は、この1号機はもともとテスト機体として作られたものです。
そのため、実際に動かしてテストをしている傍らでは、2号機の建設が同時進行をしていました。
次回は2号機のお披露目になります。
それでは。。。
登録:
投稿 (Atom)